
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
東京大学大学院情報理工学系研究科のMax Austin特任助教と中嶋浩平准教授、東北大学大学院工学研究科の大脇大准教授、山形県鶴岡市立加茂水族館の池田周平飼育課係長、奥泉和也館長の研究グループは、ミズクラゲの筋肉に電気刺激を与えることで泳ぎを誘導し、その動きをシンプルな人工知能(AI)で予測する技術の開発に成功しました。そこに独自の 3 次元運動計測装置と筋肉電気刺激装置を組み合わせることで、自発的な遊泳リズムの特徴を明らかにし、予測可能な遊泳を生み出す最適な電気刺激入力を特定しました。将来的に海洋調査や環境保全のための自律型サイボーグロボットの開発につながる技術です。
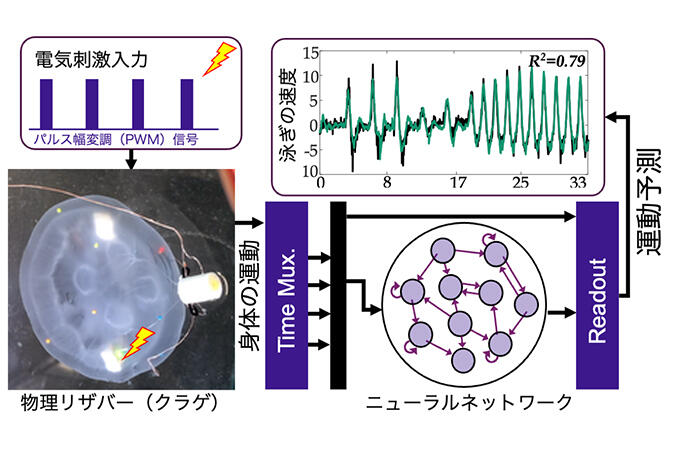
ミズクラゲハイブリッドリザバー計算システムによる運動予測
近年、生物と機械を融合させる「サイボーグ技術」は、次世代のロボット開発に向けた革新的アプローチとして注目されています。本研究では、クラゲが本来持つ自然な「身体性知能」を活用した新たなサイボーグ技術の開発に取り組みました。
本発表における最大の成果は、筋肉への電気刺激によるサイボーグ技術と計測システムを融合させ、取得した実験データの解析によって、適切な筋肉刺激条件を特定し、クラゲが持つ自発的かつ自己組織化された身体性知能を効果的に引き出すことに成功した点にあります。ワイヤレス刺激システムとの統合により、将来的には海洋環境モニタリングや環境汚染浄化活動などを支援するクラゲサイボーグの実用化への貢献が期待されます。
本研究成果は、2025年5月23日 18:00(日本時間) に科学誌 Nature Communicationsに掲載されました。
この研究成果についての詳細は【情報理工_プレスリリース_20250523】をご覧下さい。
雑誌名:Nature Communications
題名:Harnessing Natural Embodied Intelligence for Spontaneous
Jellyfish Cyborgs
著者名:Dai Owaki, Max Austin, Shuhei Ikeda, Kazuya Okuizumi, Kohei Nakajima
DOI:10.1038/s41467-025-59889-7
URL:https://www.nature.com/articles/s41467-025-59889-7
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo