
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
まず、ツーショット写真をご覧に入れよう。人間型ロボット『小次郎』と産みの親の水内講師である。「小次郎は、背骨と関節、筋肉を無意識に使い、ボール投げをしたり、でんぐり返しや寝返り、振り向いて棚の中から本を取り出したり、人間そっくりのしなやかな動きをするヒューマノイドロボットです」。ここには、従来のロボットではできない、人間らしい動作をするロボットの姿が描かれている。このような次世代ロボットを実現するためには、いままでとは違ったロボットの新しい設計手法と制御法のパラダイムを確立する必要がある。水内講師は人間の骨格構造を手本にアプローチし、ロボットの進化のベクトルも小次郎によって変わり始めたことを示そうとしているのだ。現在はまだ成長過程の真っただ中だが、近い将来、人間のような動きをし、自分で学習目標を立てられるヒューマノイドロボットが登場するのはまちがいなさそうだ。
小次郎は筋骨格型ヒューマノイドロボット。身長135cm、体重40kg余。白く映し出されたところが骨などの部分だ。コンピューターでつくった3次元の形状をそのまま樹脂を成形してつくっている。小次郎が目指しているのは、これまでのロボットではなかなか実現できなかった滑らかな動作である。
水内講師が筋骨格型ロボットをターゲットにしたのは、10年ほど前の博士課程のころ。当時実施された『柔らかいロボット』をテーマとするプロジェクトにかかわってからだ。もともと人間の体と動作に興味があり、筋骨格型ロボットは主要な研究目標だった。しかし、このロボットは、ロボットの世界で積み上げてきた制御理論(運動方程式に基づく理論)は通用しない。剛性、精度を重視する考え方では、人間がふつうに行っている動作を説明できないことから、従来の理論から脱却し、新しい設計手法と制御法の研究に大きくカジを切ったのだ。
人間が手足を自在に動かして滑らかな動作ができるのは、関節そのものによるものではなく、関節の周りにある筋肉を引っ張ったり、緩めたりすることで行っている。この動きを実現するために、ロボットを人間の体のような柔らかさと多くの関節を持つ構造にできないかと水内講師は発想した。たとえば、人間の背骨は24節あり、その間に軟骨が挟まっていることから柔らかな動きができ、元に戻る力がある。つまり、秘密は骨格構造にあると着目したのだ。とはいえ、人間の骨、摩擦のない関節、潤滑剤の密封された関節包、パワーウエートレシオの高い筋、靭帯による巧みな拘束など、どれをとっても実現が難しいものばかり。そこで、小次郎は頭蓋骨や脊椎、肩甲骨、鎖骨、骨盤など人間並みの骨格と各種関節を持ち、化学繊維でできた筋肉の筋長、筋張力などをセンサーで検知し、この筋肉を駆動することで関節を動かす仕組みにした。筋肉を動かすモーターやセンサーの数など構成部品を多くして、滑らかに動くレパートリーを増やすことにしたのだ。
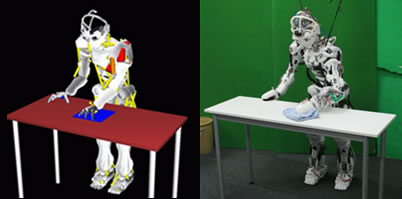 |
| 小次郎の姿勢(関節角度)と各筋の状態(長さなど)の関係を 計算するためのシミュレーションソフトウェア |
小次郎のベースになったのが『小太郎』である。コンセプトは文字どおり『人の身体構造をまねたロボット』。2005年の愛知万博時に15年後(2020年)の実用化を目指した萌芽的な日本発のオリジナルロボット技術の1つに選ばれた。デモではわかりやすいようにマット運動などの動きを予定したが、当初の見せ方とは異なる見せ方をせざるを得なかった。そのときの課題を洗い出し、解決して小次郎に継承した。肩甲骨の構造を変えて腕が自由に動ける範囲を広げつつ肩甲骨の姿勢を計測可能にしたり、スムーズに立てるように筋肉を追加したり、無理な力がかからないようにするアルゴリズムを考案し、モーターパワーを約10倍増強するなど改良を加えた。小次郎の体(ハードウェア)はまもなく完成するが、その後、マット運動やボール投げなど、人間がいとも簡単にやってのける動作ができるかどうかの本格テストに入る。それをクリアしたあとの目標は―。
人間はケガなどでその周囲の筋肉を動かしづらくなっても、他の筋肉を使って本を取り出したり、モノを持ち上げたり、何とか目的の動作を達成しようとする。水内講師はロボットも同じようなことができないかを探っている。

ロボットが学習する仕組みについては、多くの大学、研究機関で取り組んでいる。これまではロボットが何を学習するかを決めるのは人間だった。つまり、ロボットが学習の際に目標とする動作は人間が教え込んできた。ロボットに教えた過程を記録しておくと、ロボットの何を見てどこを制御したかがわかり、学習機能を高める道は用意されているが、人間が教師であるのは変わりない。テーブルに着いた手に力を入れて立ち上がろうとするやり方を教えると、そのとおりにできる。ところが、テーブルがスポンジのような柔らかい素材に変わったらお手上げなのだ。「これからのロボットには、何を学習するかを自分で決める仕組みが欠かせなくなります。それは動物で言えば、“本能”に相当するものではないか」―水内講師はそう考えている。動物は生まれながらにして快・不快(良いか悪いか)の評価指標を持っていて、脳が判定した快・不快によって行動が決まっている。これが学習のゴールや目的などを自分で立てる能力に対するカギとなる点ではないかとみているのだ。
早稲田大学から東大に転出して12年。筋骨格型ロボット研究を目標に掲げて10年が経つ。水内講師はこの“人間研究10年”でロボットの学習機能実現へ有力なヒントをつかんでいる。「赤ちゃんはみな、箸を同じように使うことができるようになります。でも、使えるようになる回路の形成過程や形成された回路は同じではないのです。そこからロボット自らが学習し、解を導き出す突破口を見いだせるかもしれません」。まったく新しい視点に基づいて、人間らしい動きと動物の本能に相当する学習機能をもたせることができれば、ロボットは真に人間にフレンドリーな存在になる。一部の機能を取りだせば、掃除や皿洗いなど個別用途に特化したロボットが誕生する。ここから研究の本質は何かを追究する研究者像が浮かび上がってくる。
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo