
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
システム情報学専攻の小室孝講師は、イメージセンサーと画像処理回路をワンチップ化したビジョンチップ「画像モーメントセンサー」を開発した。撮像対象物の大きさ、位置、形状、重心、傾きなど多様な情報が得られるので、ロボットの瞬時の制御や工作機械の位置決め、異物検査、監視・セキュリティなど幅広い用途が期待される。すでに、FAや計測関連企業から引き合いがきており、実用化に向けて企業と連携し、共同開発していく考え。このセンサー研究は、NEDO技術開発機構の産業技術研究助成事業(若手研究グラント)の一環として行った。
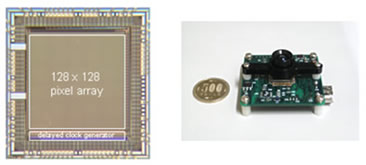  |
| ビジョンチップを内蔵した画像 モーメントセンサーと、ロボットに応用したイメージ |
ロボットや車、電子機器、オモチャなどの目としてビジョンチップが注目されているが、従来のビジョンチップは解像度、感度、機能とも問題を抱えていた。小室講師は、48×32画素だった解像度を128×128画素に増やし、感度を高めて従来必要だった強力な照明を不要にし、毎秒1000枚の画像を撮影、処理できるビジョンチップを実現した。加えて、CMOSイメージセンサーの画素ごとに光検出器、二値化器、列選択器、加算器の処理回路を配置、画素単位でこれら演算の並列処理が行えるようにし、リアルタイム演算を可能にした。こうした工夫により、画像内に映った複数の対象の位置や姿勢、形状などの画像モーメントの抽出に特化したインテリジェントな視覚センサーに仕上げた。
128×128画素のビジョンチップは0.35μmプロセスを活用、チップ面積を従来の13%と大幅に縮小し、3.28×3.48㎜に収めた。毎秒1000枚の撮像、8MHz でのモーメント演算を動作実験で確認しており、「ロボットの高速制御やリアルタイム物体認識を行うには十分な性能」と小室講師は話している。
このチップを産業用のロボットに利用すると、フィードバック制御によってアクチュエーターと対象との間の振動を完全に抑えることができる。それにより、たとえば製造ラインを流れる製品の組み立て・加工を、ラインを止めずに動いたまま行うことができるようになる。一般の画像処理装置やポジションセンサーと比べて、機能、速度、サイズ、コストとも十分対抗できる特徴を備えており、キラー・アプリケーションの開発を進めるとともに、共同開発メーカーの選定を急ぐ考えだ。
画像処理装置に関する従来技術と今回の技術の比較
| 機能 | 速度 | サイズ | コスト | |
|---|---|---|---|---|
| 一般の 画像処理装置 |
◎ 多機能でフレキシブル |
× ~30フレーム/秒 |
× カメラ+PC |
× 10~50万円 |
| ポジションセンサ (PSD) |
× 単一対象の位置情報のみ取得 |
◎ ~1kフレーム/秒 |
◎ ワンチップ |
◎ 約100円 |
| 画像モーメント センサ(試作品) |
○ 複数対象の大きさ・位置・傾き・形状などの特徴量を取得 |
◎ ~1kフレーム/秒 |
◎ ワンチップ |
○ 1,000円 (目標) |
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo