
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
ロボットが柔軟かつ高速に部品をハンドリングしたり、危険回避動作ができるようになるかもしれない。創造情報学専攻の石川正俊教授、システム情報学専攻の並木明夫講師らが、目にも止まらぬ速さで動作するロボットハンドとアームを開発し、その可能性を示したからだ。ロボットに高速に動く手やアーム機能を与えることは、人間の活動をより効率的に支援するロボットにするための重要な課題の1つ。人間を超える高速動作も夢ではなくなった。
石川教授らは、ロボットに触覚センサーを使った多指ハンドによって、柔軟にモノを扱い、高速に操る技術(ハンド)を与えることを目的としている。そのためにまず、3本の指で紐やケーブルなどの線状物体を高速に扱えるようにする研究を展開した。試作したのは、一瞬のうちに紐結びができるハンド。3本指10自由度で、0.1秒間で180度の高速動作ができるDCモーターを採用したアクチュエーターと、1000分の1秒以内で応答する触覚センサーが超高速動作を実現する決め手となった。ハンドが紐のスピードに追随して動作できるのは、この2つのキーデバイスの性能による。
ハンドの先端リンクに取り付けた触覚センサーは、シリコーンゴムにカーボンを入れた感圧導電性ゴムでできており、紐がどの位置にあるかを常に判断、制御している。紐結び動作は、3本指で結び目の元になる輪をつくることからスタート。2本の指で紐を把持し、指2本を平行に擦り合わせながらねじりを加えて輪をつくる。紐の入れ替えを行ったあと、入れ替えた紐のうちの一方を引き抜き、紐を結ぶ。実験で2本指を巧みに連携させて、輪の作成から紐の入れ替え、紐の引き抜きまでの連続動作に成功している(下の左から右への連続写真)。
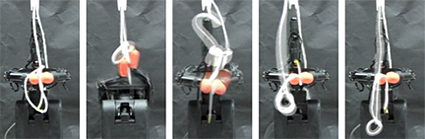 |
ロボットは、ハンドリングするモノが硬いか柔らかいかをとらえるのが不得手だが、今回の技術を応用すると、柔らかいモノをやさしく、すばやく扱う道が開けてくる。このハンドは、上から落とした生タマゴを割ることなく上手にキャッチし、空中に放り投げた携帯電話も見事に受け取る実験に成功している。今後は連続動作の信頼性向上などとともに、具体的な応用を探っていく。
また、ロボットで投球動作ができるアームを世界で初めて開発した。人間の投球動作(キネティックチェーン:各関節の動作を適切に連動させることで手先の運動を高速化する技能)を参考にした成果だ。人間の手先の速度やボールに与えられるパワーに注目すると、リリース直前に急激に増加している。これは初期段階に全身に蓄えられた運動エネルギーがリリース時に一気に放出するメカニズムが働いていることを示している。これがキネティックチェーンという動作で、効率のよい高速スウィング実現のために、この機能を参考にした。
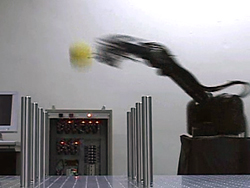
アームはワイヤ駆動の4軸マニピュレーターで、肩・肘関節にそれぞれ旋回と屈曲の自由度を持つ。最高速度は毎秒6m、最高加速度は毎秒毎秒58mの動作が可能だ。アームに用いたハンドは、3本指8自由度、手首に2自由度を持ち、トルク・重量比は従来の3.5倍の能力で、紐結びに使ったものと同様、1秒で10回の180度の指の開閉ができる。このアームの手前1.5mくらいのところに、石川教授らが開発している独創的なビジョンチップを使った。ビジョンチップは1000分の1秒でボールを抽出し、その中心の位置を計算するもので、アームにボールの位置を高速に伝える役割を持っている。
投球動作は、3本の指でボールを離れないように把持した状態から、1本の指をあるタイミングでボールから離して残りの2本指の接触に切り替え、2本指が同じスナップ動作を行いながらリリースする仕組み。現在のところ、足や腰など全身を使って投げる人間と違って、正座して腕だけで投げていることになるので、投げる速度は20-30km/h程度、目標も60km/h程度だが、速度よりも投球ボールのコントロールや方向の制御などを優先して取り組むことにしている。今回のボール投げアームは、石川教授らがすでに明らかにしている、人間が投げたボールの軌道を瞬時に読み取り、100%打ち返すロボットアームに次ぐもの。
これら超高速動作が可能なハンドやアームの技術をロボットに付与することによって、高速動作による作業効率の向上や危険回避をすばやく行う運動機能を実現できる。「人間の目には見えないスピードで動くロボットの実現に向けて、さらに研究を深化していく」と石川教授は話している。
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo