
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
2台のロボットが協調して「ボールを投げて打つ」
腕の振り、指と手首の連動に独自の工夫を凝らす
創造情報学専攻の石川教授ら、生産工程に適用へ
 |
| バッティングスローイングロボットデモ |
| ※画面をクリックしてムービーをご覧下さい |
人間が野球をするように『ロボットが投げたボールをロボットが打ち返す』システムが登場した。投手(スローイング)ロボットと打者(バッティング)ロボットの距離は、3.5mしか離れていないが、3本指で握ったボールを時速約40kmの速さでストライクゾーンに9割の確率で投げ込み、ストライクゾーンに来たボールなら100%打ち返すことができる。ダイナミックな高速連続動作を可能にしたロボットシステムは、これが初めて。
開発したのは創造情報学専攻/システム情報学専攻の石川・小室研究室。人間の指のような形をした3本指を持つスローイングロボットがボールを握って投球すると、高速ビジョンを使ったバッティングロボットがボールの位置、速さ、方向を瞬時に認識して確実に打ち返す。これまでのロボットが抱える動作速度の限界を打ち破り、人間を超える高速の認識機能を組み合わせたのがポイントで、生産工程の中で動いたまま作業する知能ロボットなどへの応用が期待される。
同研究室は、すでに1秒間に1000枚もの画像を処理する高速ビジョンを開発済み。バッティングロボットにはこの高速ビジョンを適用、1000分の1秒ごとにボールの3次元位置や軌道を検出し、ボールがストライクゾーンに入れば100%打ち返す。ストライクゾーンを外れたボールには、手を出さない(スイングしない)賢いロボットなのだ。今回は、この2台のロボットによって、ロボットシステムの知能の高度化と動作の高速化を同時に実現したのが特徴。
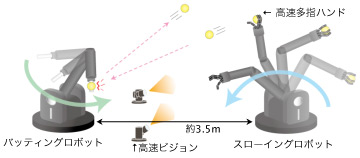 |
| 2台のロボットが協調してボールを投げて打つ実験の概要 |
 |
|
| バッティングロボット | 3本指でボールをつかんでスローイング |
ボールのスローイング動作でカギを握るのは、3本指と腕(アーム)の動作をいかに協調させるかにある。腕の振りと指・手首の動きを協調させて最大のパフォーマンスを発揮させるために、腕には軽量の高速アームを使い、その先端に0.1秒で180度開閉が可能な3本指を取り付けた。そして、腕を高速にスイングしながら手首のスナップを利かせ、3本指でボールをリリースする方向とタイミングを調整することによって、人間と同じようにスローイングする方法を可能にした。
2台のロボットの距離を3.5mにしたのは、研究室の広さの問題、ボールの速さを時速40kmに抑えたのはバッティングのスイング時間が0.2秒ほど必要なため。この成果を受けて、打ったボールを同じところに打ち返してキャッチしたり、野球のバッテリーの距離(18.44m)に広げて、変化球や時速150kmの剛速球を打ち返すロボットシステムにも挑戦する考え。
このロボットシステム研究の最大の目的は、高速の運動系(腕と手)と高速の認識系(目と脳)で構成するロボットシステムの構築にある。現在の知能ロボット研究の多くは、人間と同じ動作の実現を志向しているが、これとは異なるアプローチである。
たとえば、生産工程の中で速く動いて変化する作業を、人間を超える認識機能と運動機能で対応する知能ロボットをつくり上げるのが狙いである。石川正俊教授は「その実現に明るい見通しを得た」としており、今後は、さらに運動系と認識系の高度化を進めていくことにしている。この研究は、JSTの戦略的創造研究推進事業 発展研究(SORST)の一環として行っている。
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo