
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
ロボットに触覚機能を付与する研究の一環として、システム情報学専攻の篠田裕之准教授、博士課程の星貴之さんらは、硬さの異なる2枚の発泡ウレタンと繊維で構成した人工皮膚を開発、押された力を感度よくセンシングすることを確かめた。ロボットが家庭で使われる時代になると、人と触れ合うロボットの表面は、人の皮膚のような柔らかさが求められるが、そうした柔らかさを持つ人工皮膚の実現へ一歩近づいた。
人工皮膚は、2枚の発泡ウレタンを3枚の導電繊維で挟んだ構造。4×4cmの面積が1区画で、これを4つ並べて正方形にした。このセンサーで表面を押す力の強さや触っているものの大きさを測れるようにした。技術的には、篠田准教授らグループが開発している2次元通信技術の一種であるセルブリッジという技術を応用した。このため、人工皮膚内ではセンサーの通信の際に必要となる配線が要らないのが最大の特徴。4×4cmの境界にLSIを配置し、導電繊維間の静電容量を計測しながら、その導電繊維を触覚データの通信路として利用している。
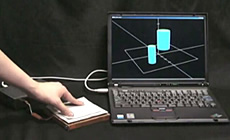 |
| センサー奥側の区画を人差し指と中指で、手前側を親指で押している様子 (円柱の高さが力の大きさ、底面積が接触面積を表している) |
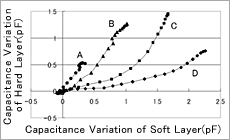 |
| 直径 (A) 0.5 mm、(B) 1cm、(C) 2cm の棒と、 (D) 平面で押したときの静電容量の変化(横軸が柔らかい発泡ウレタン層、縦軸が硬い層を表している。面積が大きいほど硬い層が変化しにくく、その違いから面積が見分けられる。また、力が大きいほど静電容量の変化も大きい) |
実際に、プラスチックの棒や平面の板を押しあて、硬い層を挟む導電繊維の間の静電容量と、柔らかい層を挟む導電繊維の間の静電容量を測定した。直径0.5mmの先端が尖った棒や、1cm、2cmと少し丸みを帯びた棒、平面の板で人工皮膚の表面を押したところ、接触面積によって2種類の静電容量の描く曲線が異なり、接触面積が見分けられることがわかった。また、その曲線は押される力が大きくなると伸びるので、鋭さと力を静電容量の変化としてつかむことができる。柔らかいウレタンは広い面積を押しても凹むが、硬いウレタンの場合は小さな面積に集中して押さないと凹まないので、この反応の違いから面積の大きさを測定する仕組みだ。柔らかいウレタンが凹み、硬いウレタンが凹まないときは大きなもので押したとき、どちらも同程度に凹む場合は、面積の小さいもので押したことがわかる。
人の腕の皮膚の場合、目をつぶって1cmくらいの間隔を空けた2点を押さえると、2点で押さえているのに1点で触っていると感じるほどで、人の場合の触覚の分解能は粗い。しかし、触っている対象物が鋭いものか、平たいものかについては、感度よく識別できるという。「人の皮膚を真似ると、人工皮膚としては、鋭さを測れれば、センサーを高密度に配置する必要はないのでは―ということが発想の原点になった」と星さんは言う。圧力センサーを高密度に配列して分解能を上げる研究が多く行われているが、ロボットの全身という広い面積に多くのセンサー素子を配置すると、配線が膨大になる可能性があり、実用的な観点から得策ではない。そこで、2次元通信技術(セルブリッジ)と融合可能な触覚センシング法を開発、それを人工皮膚に取り入れた。
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo