
-
- ■産学連携
- 国際交流
- ダイバーシティ
- 情報理工学の創造的展開プロジェクト
- 受賞・表彰
創造情報学/システム情報学専攻の石川正俊教授らは、高速のビジュアルフィードバック技術と顕微鏡を組み合わせて、観察場所を選ばず、手が届く範囲ならどこでも持ち運んで観察ができるモバイル顕微鏡や、ホヤ精子の高速の動きを高い精度で連続観察する技術に見通しをつけた。モバイル顕微鏡は光学顕微鏡の利用拡大に結びつき、ホヤ精子連続観察の研究は、微小な対象であってもトラッキングできる微生物トラッキングシステム実用化への第一歩となるものだ。
これらの成果の中核になるのは、石川教授らが開発したビジョンチップ。1秒間に1000枚の画像処理ができ、この高速画像処理技術を生かして、新たなコンセプトのモバイル顕微鏡などを明らかにした。

まず、モバイル顕微鏡は、台の上に置いて使う光学顕微鏡の使用限界を破るものといえる。ステージに載せられないもの、分解できないものを観察するのが目的で、手で顕微鏡本体を持ち運んで使用する。問題は顕微鏡を動かしていくので、動かすことによる手ブレの影響をいかに除去するかにある。普通に行うと、手の微妙な震えが伝わるために、顕微鏡像面上にはっきりとした像を結ばせるのは困難で、それを画像処理によって止める工夫、すなわち、ビジョンチップによるビジュアルフィードバックを用いて画像を安定化する手法を開発した。
手の振動による画像のブレやボケを補正する技術は、カメラに搭載されているが、カメラ向けの手ブレ補正技術は被写界深度が大きいカメラ用に構築されているため、光学軸方向の平行移動による焦点のズレが考慮されておらず、被写界深度が非常に浅い顕微鏡には専用の技術が求められる。顕微鏡画像の安定化のためには、観察範囲をμmオーダーの精度で一定に保つ必要があり、石川教授らは、撮像素子を光学軸に対して傾けた高速ビジョンを取り付けることによって、その取得画像から顕微鏡本体の3次元方向の変位を計測し、フィードバックする手法を見いだした。この方法で金属ネジの頭を対象に観察実験したところ、ネジの頭の像がブレたりぼやけたりせずに、フォーカスした画像を得ることに成功した。このようなモバイル顕微鏡が実現すれば、取り外しがむずかしい建築物の表面や、ジェットエンジンのような構造物内部の欠陥検査、解剖した後の臓器の様子観察など、広範な利用が期待される。
最終目標は、手の振動による顕微鏡の変位を計測し、顕微鏡に内蔵したアクチュエーターによって変位がキャンセルされるように焦点面を制御することだが、今回、アクチュエーターを内蔵ではなく、外部に置いた評価システムで画像の安定化を実現した。これが成功したことにより、最終目標の実現の見通しは明るいとしている。
一方、ホヤ精子は、ある種の化学物質に近寄っていく性質(走化性)があり、そのメカニズムがわかれば、モータータンパク質の動態解明など生物学上、大きく貢献する。そのためには、精子の位置、姿勢、鞭毛の形状などを顕微鏡下で詳細に継続観察することが必要になるが、精子の動きはきわめて早く、これをいかにトラッキングするかがカギ。精子の頭部直径はおよそ2-3μmで、光学顕微鏡の回折限界に近いサイズであり、しかも、1秒間に頭部直径の150倍の距離を泳ぐという。身長2mの人間に当てはめると、1秒間に300mという音速に近い驚異的な遊泳スピードを誇る。このため、顕微鏡で観察しようとしても、たちまち視野から外れてしまう。そこで、石川教授らは、理学系研究科三崎臨海実験所の吉田講師らと共同で微生物トラッキングシステムを開発した。
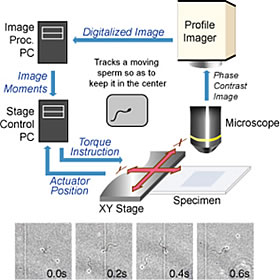 |
| 微生物トラッキングシステムの構成と、 同システムで捉えたホヤ精子の連続写真 |
石川教授らが開発したトラッキングシステムは、プロファイルイメージャと呼ぶビジョンシステムが効果を発揮している。精子をXYステージに固定した2次元チャンバーに入れ、プロファイルイメージャで撮影して位置を計算、これをもとに精子が常に視野の中心に位置するようにXYステージを自動制御する仕組みだ。これらのプロセスは1kHzのサンプリングレートで実行する。ホヤの一種(カタユウレイボヤ)を使用した実験の結果、遊泳精子を安定してトラッキングし、精子の運動や鞭毛の形状もはっきり観察できた。トラッキングの最長継続時間は130秒だった。この成果について、ビジョンチップ、XYステージの制御技術が大きく効いており、他のさまざまな運動性細胞の観察にも適用可能で、今後、実際にホヤ精子の走化性の評価に用いていきたいと石川教授は話している。
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo