|
[an error occurred while processing the directive]
|
 |
 |
 http://www.ynl.t.u-tokyo.ac.jp/index-j.html http://www.ynl.t.u-tokyo.ac.jp/index-j.html
 |
中村 仁彦 教授
工学部2号館82D2号室 |
 |
|
 |
山根 克 准教授
工学部2号館82D1号室 |
|
|
研究分野
ロボティクスの基礎技術として、運動の計算理論、非線形力学・制御、脳型情報処理を研究している。応用技術としては、ヒューマノイドロボット、外科手術ロボット、ヒューマンフィギュアの運動生成などに取り組んでいる。
研究テーマ
| 1. |
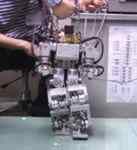
脳型情報処理とヒューマノイド
・力学的情報処理によるヒューマノイドの行動制御
・身体性とシンボルをむすぶミメシス(ものまね)理論
・コンプライアンスをもつヒューマノイド(The Cybernetic
Shoulder)
|
| |
 |
| 2. |
 外科手術ロボティクス 外科手術ロボティクス
・低侵襲心臓外科手術システム
(心臓の動きに同期するロボット)
・低侵襲外科手術用レーザポインティング内視鏡
(術中臓器形状スキャナー)
・低侵襲一般外科手術ナビゲータ |
| |
|
| 3. |
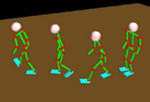
ヒューマンフィギュア
・構造可変力学系計算法を用いた高速運動計算
・インターラクティブ・ヒューマンフィギュア
・ビヘイビアキャプチャシステム
(運動情報、力学情報、認知情報の実時間同時計測)
・筋骨格モデルの力学計算
|
|
|
|