|TOP|お知らせ|ごあいさつ|募集要項|カリキュラム|教官リスト|設備|参加学生紹介|イベント・レポート|ソフトウェア|
 東京大学大学院修士課程1年
本年11月から戦略ソフトウェア教育コースに参加した。はじめにその動機、戦略ソフトウェアに対する考えを記し、後に実際に行なった活動報告を行なう。本年度は戦略戦略ソフトウェア作成のための、会議での発表が主な活動であった。
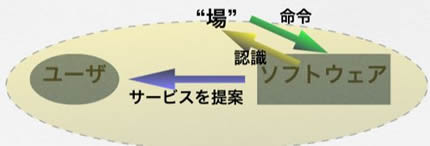
戦略ソフトウェアとは多くの人の生活を一変させる力のあるソフトウェアであると考える.通常のソフトウェアとは異なり,認識行動システムはその性質上ハードウェアと切り離すことができないことが特徴である.また,コンピュータの普及率に比べ,ロボットの普及率は遙かに低くい.その原因として考えられるのが,そのハードウェアのコストが高いことがあげられるが,もうひとつ大切なことがある.キラーアプリとなる,そのソフトウェアも未だにないことである.PCやインターネットであればWWWやE-mailなどがそれであったといえるだろう.それはつまり,人々の生活を変えるような,戦略性のあるソフトウェアが,認識行動システムにおいては,まだ多数埋もれていることでもある.ロボットの普及率を一気に向上させるソフトウェアを書くことが認識行動システムにおける最大の戦略ソフトウェアであると考える.
2、3週に一度活動報告を行っている。現在のところ作成するソフトウェアの提案が主な内容である。各回の詳細を以下に示す。 第1回 自己紹介、研究紹介を行った後、以下のような発表を行った。
FFFに実装したい機能
第2回 FFFがいまいちな印象だったので、他に新しいプログラミング環境の提案を行なった。
作成ソフトウェア案1) 外界認識型エージェント(ひたすらしゃべるソフトウェア)
作成ソフトウェア案2) スクリプト言語であるpythonでロボット統合開発環境
プログラミング環境は当り前という意見だった。根本から考え直し、と言われた。 第3回 がらっと変えて、布を扱うロボットの提案を行なった。布のシミュレーション、認識の現状の紹介、ロボットへの応用に関して述べた。 第4回 布に関してさらにつめた発表を行なった。
を作る。 布の認識とは?
地味すぎ.最初はハンカチくらい簡単なものがいい.手品はどうだ?
第5回 ハンカチをつかった手品の紹介をおこない、また,HRP-2を用いてマジックの前段階までやらせた.
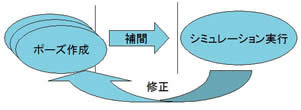
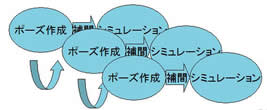
第6回 再び実世界指向プログラミング環境の提案を行なった。 たとえば,
実際に簡単なプログラムをつくり、デモを行なった。 さらなる発展・展望
他の人と違うところを打ち出さないと戦略的とはいえない、という指摘をうけた。
今年度は作成するソフトの方向性,内容に関する議論が主な活動であった.次年度は最後に提案したプログラミング環境を作成してゆく予定である. |
||||||||||||||||||||||||||||||||||||