|TOP|お知らせ|ごあいさつ|募集要項|カリキュラム|教官リスト|設備|参加学生紹介|イベント・レポート|ソフトウェア|

教育コース生 神崎秀 平成15年度は、1月に本プログラム教育コースの選抜試験を受験し、選抜された後の3ヶ月間の活動であった。主だった活動は、以下の通りである。
以下に順に各活動について報告する。
近年、ヒューマノイドをはじめとするロボットの研究・開発が盛んに行われるようになってきているが、現在達成されているヒューマノイドのレベルというものは、実世界での本格的な活動をさせるためにはまだまだ貧弱であると言わざるを得ない。今後社会や家庭の中で人間のパートナーとして活動できるロボットを開発していくためには、よりよい機構や環境の情報を的確に取得できるセンサ、より安定した動作を実現するための制御方式の開発もさることながら、それらを効果的に組み合わせてユーザの要求を的確にこなすことのできる優秀なソフトウェアを創造することが必要不可欠である。研究開発に携わる人々が自分の興味ある部分の研究に集中でき、その他の部分はどんなロボットであっても同様に容易に扱えるようなシステムを構成することが戦略的であると考える。 本年度はヒューマノイドの動作の生成・修正をキーワードに,新しいパラダイムでのモーションエディタの作成を提案した.以下では教育コースミーティングにおける議論の流れと現在作成を目指しているモーションエディタの概要について述べる.
第1回(11月10日):(発表資料) 「視覚・力覚情報を統合した等身大ヒューマノイドの状況適応行動生成ソフトウェア」を提案した. 第2回(12月1日):(発表資料) 第1回での議論を参考に,「ヒューマノイドモーションエディタ」の提案を行った. 第3回(12月22日):(発表資料) 3次元位置入力手法の提案と,利用する部品のサーベイを行った. 第4回(1月13日):(発表資料) 単眼視画像からの人間の動作情報を取得し,3Dキャラクタの動作情報とするソフトウェアを提案した. 第5回(1月26日):(発表資料) 第4回で提案したソフトウェアの詳細な外部仕様を作成した. 第6回(3月1日):(発表資料) 外部からの作用力を用いたヒューマノイドの動作修正ソフトウェアを提案した. 第7回(3月15日):(発表資料) 第6回で提案した内容を動作主体,動作環境,操作者意図の力学的表現における相互作用と定義し,プリミティブなレベルでそれを表現するソフトウェアを作成し,デモを行った.
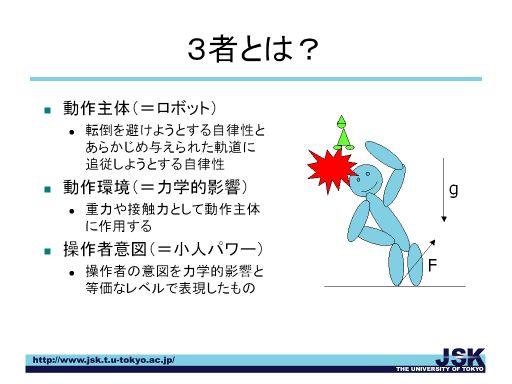
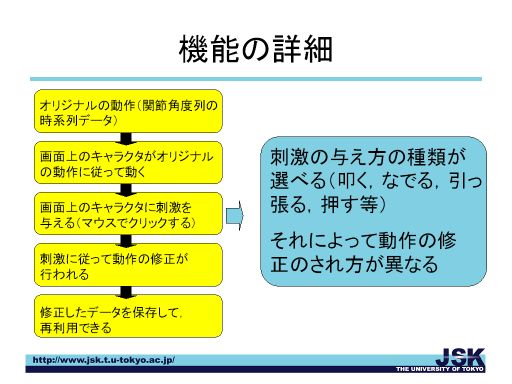
これまでの議論を踏まえて,現在作成しようと考えているのは「動作主体,動作環境,操作者意図の3者の力学的相互作用に基づくヒューマノイドの動作修正ソフトウェア」である.従来ヒューマノイドの動作データやモーションキャプチャから得られた人間の動作データは,その動きを修正する場合,関節角度空間において特定関節の時系列データを直接変更したり,特定瞬間の手先位置・足先位置を指定し運動学を解決することでその前後の関節角度データに反映させるという手法がとられてきた.これは多自由度のヒューマノイドを対象とする場合,操作が煩雑となりユーザにとって直感的でない.そこで,オリジナルの動作を再生するヒューマンフィギュアに対して,叩く,なでる,爆発するなど外部から影響を与えることで直感的な動作変更を行うことな可能なインタフェースを提案した.
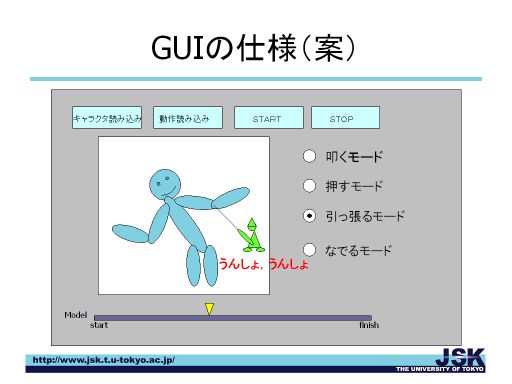
現在プリミティブなレベルで上記の機能の実装を行い動作の確認,問題点の洗い出しを行っている.今後は3次元・多リンクに拡張し,GUIの整備も行って使えるソフトウェアにしていきたいと考えている. | ||||||||||||||||||