|TOP|お知らせ|ごあいさつ|募集要項|カリキュラム|教官リスト|設備|参加学生紹介|イベント・レポート|ソフトウェア|

学際情報学府 星野 瑠美子
今年度は、概括すると、人間と応対するロボットの頭脳部分の戦略的ソフトウェアの作成を目指した。その中で具体的に提案したのは、AIBOの新たなプログラムの作成、インテリジェントカメラロボットのソフトウェア構成、新たな留守番ロボットのソフトウェア構成であった。 ソフトウェアを提案するにあたって考察したのは、何を作りたいか、それが実現可能か、どんな構成にするか、競合する既存製品はないかということだった。特に、それが戦略的なのかというのは、一番心を砕いた課題であり、そのためにまず既存のソフトウェアの調査と何を目指すのかという討論を行った。
まず、ロボットを対象としたソフトウェアを作る上での環境となる、既存ロボットシステムの調査と考察を行った。私が所属する井上稲葉研のシステム、商品として公開されているSony、Activmediaのシステムを調査対象とした。その結果を下にまとめる。
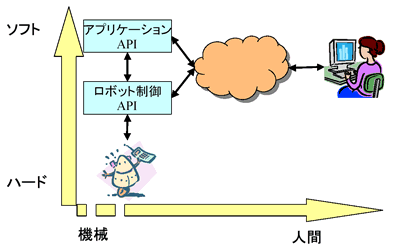
以上のような既存のロボットシステムは、ハードに近い制御部分のAPIと、アプリケーションレベルのAPIに分かれて構成されている。しかしその切り分け方は各システムによって異なってる。制御部分のAPIは機械制御(machine control)を司り、与えられたコマンドを機械のトルク/圧力等に変換し、フィードバックを受け取り、与えられたコマンド通りにロボットを動かしている。またセンサ情報を受け取るのもこのAPIである。 一方アプリケーションレベルのAPIは、制御部分のAPIを基礎として作られ、規則による行動決定、タスク記述、パスプランニング、センサ情報の解釈、判断、物体認識、画像処理を行う。
私が作りたいソフトウェアは、この2つのAPIを繋ぐ部分であり、人からの入出力も扱う部分であると明らかになった。このイメージを上図に示す。
作りたいソフト領域は決まったが、具体的にどのような場面で役立つものを作ったらようかという次の課題が生まれた。私は一歩先の留守番ロボットの制作を考えた。そのロボットは、自動、手動どちらでも、家の安全を確認し、宅配便、郵便、業者、来客といった外部者と応対もでき、時には侵入者を発見してしかるべく通報を行い、留守中の家族やペットへの対応もできるものとしたいと思った。
その場合のソフト領域を分析すると、ユーザが使いやすいユーザインタフェースと人間やセンサ入力に対する反応の記述(○○だったら××する)が必要だとわかった。また命令の優先度の決定とタスクのなめらかな切り替えも必要だった。
対象は、ホームセキュリティ、Webカメラ、ホームロボットである。ここでは監視の柔軟性と、人への対応において、欠点があると考えられた。 Webカメラは利用者側の要求で外出中でも子供やペットの様子がみられ、個人的にいつでも設定を変えて使えるものであった。ホームロボットとしての番竜は、リモート操作ができ、火事やガス漏れを検知して携帯電話に連絡する機能を持っている。価格は約200万円であった。 ホームセキュリティシステムはセコムやSOKが開発したシステムで、センサとカメラによる24時間の侵入者監視のシステムである。利用者側の要求によって、外出中、深夜の安全の確保が可能で、いざという場合は警備員が来てくれるというサービスがあった。 ホームロボットについては4月にRobodexが催され、新たなロボットが発表された。
このように本年度は既存のシステムの調査・分析と戦略的なソフトウェアが何であるか検討してきた。その結果これらの新しくRobodexにおいて発表された製品は私の目指す方向とかなり競合しているとわかり、自分のつくるソフトウェアが戦略的というプロジェクトの条件を満たすことが難しくなった。 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||