近年、生体材料と人工物を組み合わせたバイオハイブリッドロボットが注目を集めています。
これまで、これらのロボットでは前に進みながら旋回する大回りの旋回動作である、匍匐(ほふく)移動や魚類のようなヒレによる泳動しか行えていませんでした。
東京大学大学院情報理工学系研究科の竹内昌治教授と早稲田大学理工学術院の森本雄矢准教授らによる研究グループは、培養骨格筋組織の収縮運動によって「柔軟な足」で屈曲して動く二足歩行バイオハイブリッドロボットを世界で初めて製作しました。本研究で実現したロボットでは、一方を駆動足、もう一方を軸足に用いることで、ロボットボディの内側に旋回中心を設けることが可能になり、ヒトの二足歩行運動で観察される細やかな旋回運動を再現することに成功しました。
この研究の成果は、バイオハイブリッドロボットの開発に加え、ヒトの運動メカニズムの理解につながります。薬剤添加時の運動改善効果解析、疾患時の病態解析など様々な状態での運動モデルとして、薬学や医学分野での適用が考えられます。
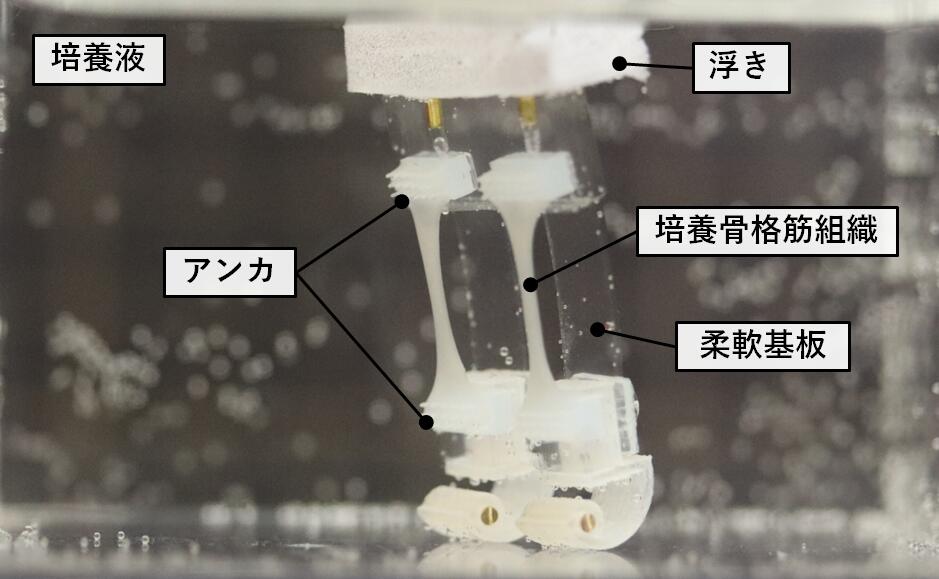
筋収縮で動く二足歩行ロボット
この研究成果についての詳細は【情報理工_プレスリリース_20240127】pdfをご覧下さい。
雑誌名:Matter
題 名:Biohybrid bipedal robot powered by skeletal muscle tissue
著者名:Ryuki Kinjo, Yuya Morimoto, Byeongwook Jo, Shoji Takeuchi* *責任著者
DOI:10.1016/j.matt.2023.12.035
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo