|
ゴルフの腕前が上達する(?!)「マジックミラー」(魔法の鏡)が登場した。練習場の鏡と違って、スイングをしたときの筋肉の活動する様子を色で示してくれるので、筋肉の正しい動かし方を自分の目で見て確かめることによって、最も適したスイングを身につけるのに役立つ。スポーツのトレーニング効果の評価だけでなく、家庭で行うデイリーヘルスケア、健康管理やリハビリ状況の把握、医療効果の診断、介護や介護教育といった幅広い活用が見込まれる。ロボットが人を観察する目として利用すると、ロボットが人の行動を理解したり、人に手を差し伸べたりするきっかけを見つけることができるような使い方へと発展する可能性もある。
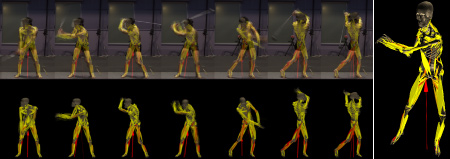 |
筋張力をリアルタイムでテレビ画面に可視化したコマ撮りの図
(上:実際のビデオ画像にオーバーレイ表示したもの)
(下:筋張力のみを表示したもの) |
マジックミラーを開発したのは、東京大学IRT研究機構の中村仁彦教授ら。マジックミラーの仕掛けは、カメラを内蔵した大型フラットテレビの中にある。ミラーの前で運動すると、自分の姿を透かして見るかのように、カメラやセンサーが捉えた筋肉の活動状況をリアルタイムで見ることができる。動いている筋肉は赤く表示されるので、活動していない筋肉とひと目で見分けられる。毎日運動すると、筋肉の使い方に変化が起きているか、特定の筋肉やすべての筋肉を使う運動ができているかどうかを確認できる。また、マジックミラーの前で運動をすると、腕、胸、腹、腿など16ヵ所の質量分布を計測する技術も開発した。マジックミラーで動きが足りないところを確認しながら運動することで、全身の体型の変化、部位別の体重の変化などを知ることができ、この情報を健康管理に役立てることができる。
これらの技術は、運動中に体のどの部分の筋肉が動いているかをリアルタイムで画面に表示するようにしたのがポイントで、①筋肉の活動を目で見えるようにする(可視化)、②人体の各部位の質量分布を可視化する点が新しい。マジックミラーはこれを統合してつくった。
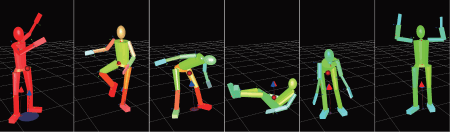 |
| データが蓄積されて推定精度が上がるにしたがってセグメントの赤から緑に変わる。赤いセグメントを中心に運動することで、推定をインターラクティブに行うことができる |
中村教授らは、これまでにも人の全身の筋の活動を可視化する独自の手法を開発している。155自由度の骨格と1190本のワイヤを用いて筋、腱、靭帯、軟骨などをモデル化し、このモデルを使って全身で運動している様子を10秒程度計測し、その結果を数十分後に可視化して表示する技術である。これはロボティクスの運動学や動力学の計算アルゴリズムを、人体の運動解析と深部感覚(筋や腱の張力、それを支配する神経の活動)の推定に応用する研究の一環で、すでに、プロボクサーのトレーニングの解析などに試験的に利用している。今回は、これらの技術をリアルタイム化した。
仕掛けは、10台のカメラからなるモーションキャプチャーシステム、床反力計のほかに、筋活動の可視化にはさらに16チャンネルの無線の筋電計がある。筋の数を約1/3にしたモデルを用い、独自に開発したアルゴリズムや並列処理によってリアルタイムでの可視化を可能にした。
今後は、データ取得の効率化など改良を加えるとともに、ロボットの目に応用できるよう研究を深化させる考え。
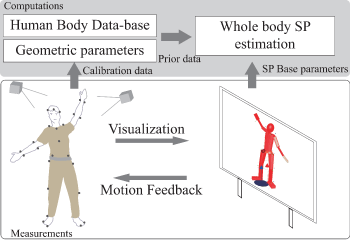 |
| 計測と計算の原理 |
|
