知能の力学的情報処理能力をロボットに
知能機械情報学専攻 中村仁彦(よしひこ)教授
 「身長60cm、体重6.5kgのヒューマノイドロボット」が「170cm、60kgの人間」とリング上でバーチャルファイト。リングはコンピューターの画面の中。直接攻撃するのではなく、距離を保って格闘ポーズを取るだけだが、ロボットは人間の格闘技を見て、リアルタイムで反撃しファイトパンチを繰り出す。このロボットと人間対決を仕掛けたのが中村教授だ。ロボットがスポーツ選手と同じような優れた反射神経を持ち、すばやく行動するシーンを2年前の『愛・地球博』で公開したが、ここに中村教授が進めるヒューマノイドロボットの青写真がある。「人間と同じ思考回路をロボットに埋め込むのではなく、子どもが大人の動作を真似て自分の運動機能として実現してきたように、ロボットも学習することで賢くしたい。これが私たちに役に立つ、使いやすいロボットにする道です」
「身長60cm、体重6.5kgのヒューマノイドロボット」が「170cm、60kgの人間」とリング上でバーチャルファイト。リングはコンピューターの画面の中。直接攻撃するのではなく、距離を保って格闘ポーズを取るだけだが、ロボットは人間の格闘技を見て、リアルタイムで反撃しファイトパンチを繰り出す。このロボットと人間対決を仕掛けたのが中村教授だ。ロボットがスポーツ選手と同じような優れた反射神経を持ち、すばやく行動するシーンを2年前の『愛・地球博』で公開したが、ここに中村教授が進めるヒューマノイドロボットの青写真がある。「人間と同じ思考回路をロボットに埋め込むのではなく、子どもが大人の動作を真似て自分の運動機能として実現してきたように、ロボットも学習することで賢くしたい。これが私たちに役に立つ、使いやすいロボットにする道です」
 |
| 格闘技リング ヒューマノイド(58cm)と人間(170cm)の 離れた場所での格闘をリング上に合成 |
| ※画面をクリックすると、拡大画像をご覧になれます |
ロボット研究はきわめて多彩だ。組み立て、溶接、検査などの産業用ロボットだけでなく、血管内を診断したり手術したり、家庭で介護、介助する次世代ロボットまで見渡すと、出番を待っているロボットは数多い。技術の中身は、個別機能の開発からコア技術確立を目指したアプローチまで、実にさまざまだ。ヒューマノイドロボットを力学と制御の観点から攻めている中村教授の目標は、知能の力学的情報処理の確立だ。体の動きと情報処理が一体となった力学現象を『脳型情報処理』と位置づけ、ロボットの行動の『獲得』、『認識』、『発現』を統合した力学的システムの構築に最大の目標を置く。
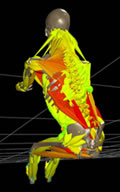 |
| 筋骨格モデル 運動の計測から逆動力学を解いて筋肉の活動を推定する |
その切り口は―。人間の体の中の情報と外に表れる運動の形を結びつけることで、知能を現せないかという点だ。人間の行動を観察すると、どんな行動を起こそうとしているのか、何を意図しているのかがわかってきて、行動の初めと終わりも想像がつくことが多い。これと同様に、ロボットに人間が日ごろ行っている行動をたくさん見せておいて、その行動はどんな行動に結びつくのかをわかるようにしたいのだ。ロボット自体が人間の行動パターンを予測し、計算して行動するようになると、日常生活の中にロボットが入り込む社会では、人間にほんとうに役に立つものになる。そのために教授は、人間が行う動作パターンに注目した。動作を注意深く見ると、関節の動きなどから切れ目がある。切れ目を発見して動作をセグメントに分け、切り分けたものを集めてクラスターとし、クラスターから代表となる動作を記号として抽出する。それを組み合わせてロボットが運動パターンを理解し、推論によって行動できるようにした。つまり、人間を観測して行動を理解し、自律的に意思決定し行動を起こす、その具体化第一弾が、ロボットが人間と対等に渡り合う格闘技対決である。人間の動作を10台のカメラを使ったモーション・キャプチャーシステムで捕らえ、ミメティックコミュニケーションモデルに基づいて瞬時に行動を認識できるようにした。その結果、「人間と同等の0.3秒という高速動作を実現できました」
人間の全身の運動パターン処理を行うセグメンテーションやクラスタリングには、統計的な情報処理で最もよく知られている隠れマルコフモデルを使った。現在は一歩進んで、パターンの時間的、空間的な精度向上へと移行している。また、カメラで人間の関節の角度を見ていたのを、解剖学のモデルを活用すると、関節の動きから筋肉の張力、神経の束の活動が推定できることから、筋肉をどう使っているか、神経をどのように活発に機能させているかなどを追究する研究に軸足を移している。
 こうしたヒューマノイドロボット研究を強力に後押ししているのがIRTプロジェクトである。情報技術とロボット技術を融合し、少子高齢化が進む時代(10年後)に向けて、ロボットに欠かせないコア技術の確立を目指した戦略的なプロジェクトだ。情報理工を中心に産業界との協働研究がスタートしている。プロジェクトの主眼は人間の生活支援をするロボット技術開発にあり、中村教授が目指しているのは、文字どおりロボットの知能化だ。ロボットがシナリオ(プログラム)どおりに動くのではなく、人間の意思や行動を理解し、人間が慣れ親しんだ身振り、手振りで応えるロボットをつくりたい。単に、受け身で行動パターンを蓄えるだけでなく、状況に応じていつでも行動を引き出せるように多くのパターンを持たせる研究を推進中だ。
こうしたヒューマノイドロボット研究を強力に後押ししているのがIRTプロジェクトである。情報技術とロボット技術を融合し、少子高齢化が進む時代(10年後)に向けて、ロボットに欠かせないコア技術の確立を目指した戦略的なプロジェクトだ。情報理工を中心に産業界との協働研究がスタートしている。プロジェクトの主眼は人間の生活支援をするロボット技術開発にあり、中村教授が目指しているのは、文字どおりロボットの知能化だ。ロボットがシナリオ(プログラム)どおりに動くのではなく、人間の意思や行動を理解し、人間が慣れ親しんだ身振り、手振りで応えるロボットをつくりたい。単に、受け身で行動パターンを蓄えるだけでなく、状況に応じていつでも行動を引き出せるように多くのパターンを持たせる研究を推進中だ。
並行して、ロボットを人間サイズに成長させる研究も展開している。行動パターンの複雑さはあまり変わらないが、人間並みの大きさにする設計技術、パワーがあって、エネルギー効率のよいアクチュエーター、動力源とモーターなどを用意することは一筋縄ではいかないという。当面、関節には油圧を、モーターは電動式などを駆使して正面突破を図る。
「ロボットは学際研究の代表格でしょう。醍醐味があり、研究者冥利に尽きますね」。ロボット研究は、機械、物理、精密工学、情報、生物、神経・脳科学といった多くの領域がかかわっている。言い換えれば、“人間を知る”研究であり、その成果がロボットに生きるだけに、醍醐味を覚えるという。
研究者になる道を選んだのは、卒論でロボットが研究対象になることを感じたときからだそうだ。「知能はそれ自体、独立したものではなく、体と環境とのインタラクションによって獲得されるもの。そのカギを握るのは非線形な性質にあり、力学や制御からアプローチできる」と思ったことが現在の研究につながった。クルマで縦列駐車する際、切り返しながら、どんな場所に、どんな向きにでも駐車できるのは、人間が非線形をうまく使いこなしている例である。ロボットが反射的にモノをつかみに行く動作をカオスや非線形力学モデルを使ってトライする一方、1998年から5年計画で推進した『ロボットの脳を創る』プロジェクト(科学技術振興機構のCREST)が決定打となり、ここで固めた脳型情報処理研究をもとに、大規模な非線形システムであるヒューマノイドロボットに行動する知能を与える見通しをつけた。人間並みサイズのロボットに技術移植する時が近づいている。
 |
| 開発した3種類のヒューマノイドロボット (左から.UT-μ:magnum (58cm).Ut-μ:mighty (58cm).UT-θ(150cm)) |
Copyright © 2019 Graduate School of Information Science and Technology, The University of Tokyo