 |
| 食器を器用に扱うキッチンロボット |
 |
| 多種類のセンサーを埋め込んだエンドイフェクタ |
 |
| 標準食器の手探りマニピュレーション |
流し台に置いてある食器を器用に扱い、食器洗い機にセットし、スイッチを入れるキッチンロボットが登場した。ゆっくりした動作ながら、センサーで食器の色や形などの特徴をつかんで持ち上げて運ぶ。ロボットが人間の動作にしだいに近づいてきた。
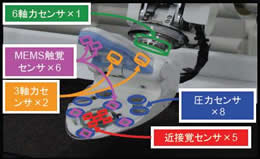
このロボットは、人間の片腕に似た外観で、手は写真のように子どもたちが愛用するミトン手袋のようだ。東京大学IRT研究機構とパナソニックが共同開発したもので、腕と手を器用に動かして、白いお椀や白い皿、透明なコップなどを食器洗い機に入れ、スイッチを押すところまで自在にこなす。
技術的なポイントは、手に埋め込まれた多数のセンサー。個々のセンサーの特性を生かして食器を手探りで扱う。ロボットが食器に触れる前は、近接覚センサーで手と食器の距離や食器の表面情報を赤外線で探り、触ってからは圧力センサーとMEMS触覚センサーを使って、つかもうとしたときの滑りの程度を感知して、力の入れ具合を調整する。ロボットにとって、白い、透明感などを認識するのはきわめて苦手だが、白い色の食器でも、おおよその形などを認識し、その後は手の感覚で食器を扱えるようにした。MEMS触覚センサーは2㎜角の超小型センサーチップを柔軟な材料に埋め込んだもので、食器の縦、横、高さの情報をつかみ、センサーチップ当たり最小で0.3gの重さを測ることができる高感度がウリ。この触覚センサーは、経済産業省主催の「今年のロボット大賞2008」の優秀賞を受賞した。
食器の後片付けは「食器の運搬(下膳)」、「残り物処理」、「食器洗い」、「食器収納」の4工程に分けられるが、食器を扱う技術はすべての工程にかかわる重要な技術。今回、多数のセンサー技術と、センサーから送られてくる感覚情報に瞬時に反応するように構成した高度なソフトウェアを統合することによって、ロボットが食器を器用に扱う見通しがついた。食器収納など多くの工程の自動化に役立つとみられる。
 |
| 近接センサーによる食器の形状ならい |
 |
| 食器の高さ確認、把持確認、設置確認 |
|